 AD与DA
AD与DA
# AD/DA转换
学习目标:
- AD/DA转换,也就是数字信号与模拟信号之间的转换。模拟信号转换为数字信号我们使用可调电阻、光敏电阻和热敏电阻来实现,在光敏电阻小于100时(较暗),D1灯会自动亮;而数字信号转换为模拟信号我们使用实现DA呼吸灯来展示。
# 一、AD/DA介绍
- AD(Analog to Digital):模拟-数字转换,将模拟信号转换为计算机可操作的数字信号。
- DA(Digital to Analog):数字-模拟转换,将计算机输出的数字信号转换为模拟信号。
- AD/DA转换打开了计算机与模拟信号的大门,极大的提高了计算机系统的应用范围,也为模拟信号数字化处理提供了可能。

# 二、硬件电路模型
AD:就是将电压量转换为数字量。
DA:其实有点类似于PWM,最后经过一个低通滤波器,就能实现效果了。

- AD转换通常有多个输入通道,用多路选择开关连接至AD转换器,以实现AD多路复用的目的,提高硬件利用率
- AD/DA与单片机数据传送可使用并口(速度快、原理简单),也可使用串口(接线少、使用方便)
- 可将AD/DA模块直接集成在单片机内,这样直接写入/读出寄存器就可进行AD/DA转换,单片机的IO口可直接复用为AD/DA的通道
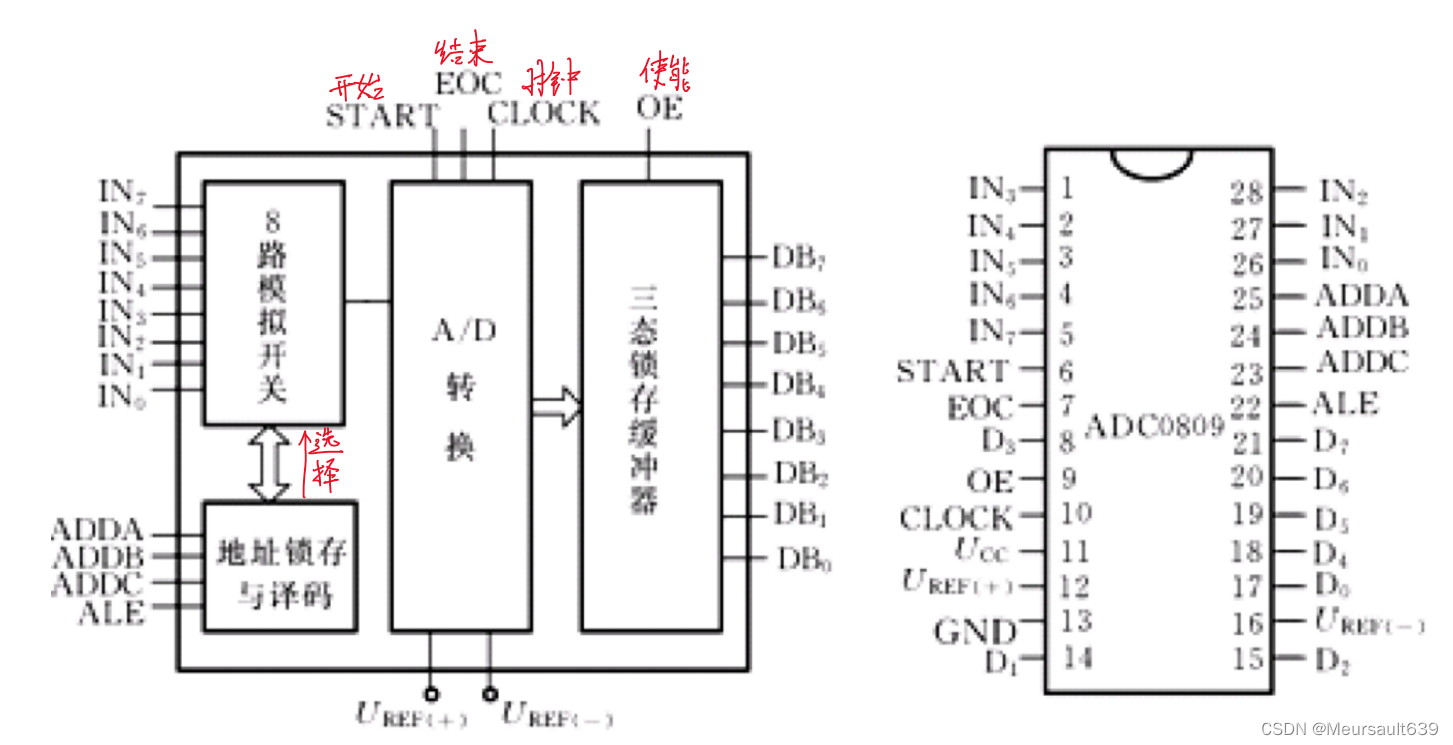
# 1、AD
这是一个简单的AD芯片(ADC0809),首先选择模拟开关,之后进行AD转换,再通过缓存器输出,就可以了。
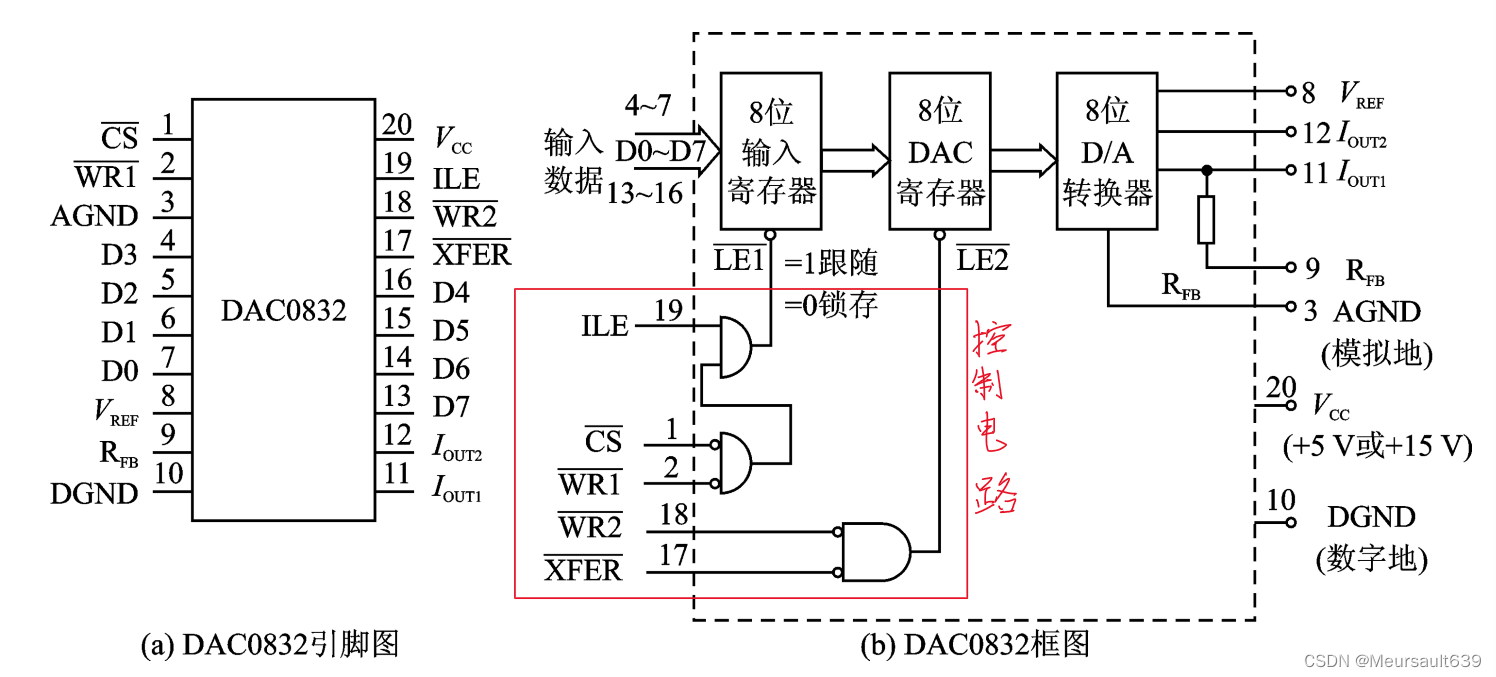
# 2、DA
这是一个简单的DA芯片(ADC0832),首先输入数据,通过控制电路控制寄存器,最后通过一个DA转换器输出就成了。
# 三、运算放大器
- 运算放大器(简称“运放”)是具有很高放大倍数的放大电路单元。内部集成了差分放大器、电压放大器、功率放大器三级放大电路,是一个性能完备、功能强大的通用放大电路单元,由于其应用十分广泛,现已作为基本的电路元件出现在电路图中
- 运算放大器可构成的电路有:电压比较器、反相放大器、同相放大器、电压跟随器、加法器、积分器、微分器等
- 运算放大器电路的分析方法:虚短、虚断(负反馈条件下)
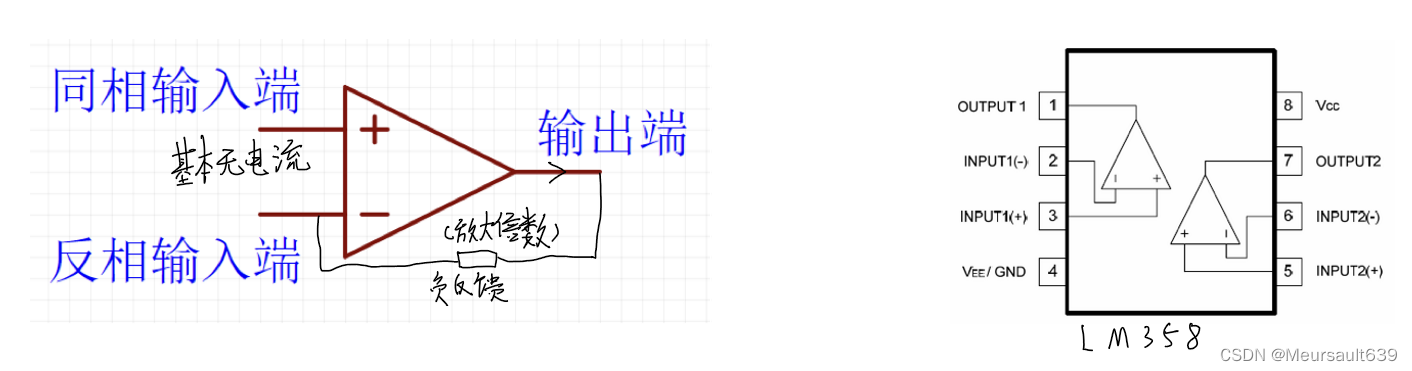
- 运算放大器的输入端输入阻抗非常大,即同相和方向输入端电流都几乎为0(虚断)
# 四、运放电路
# 运放电路 (opens new window)
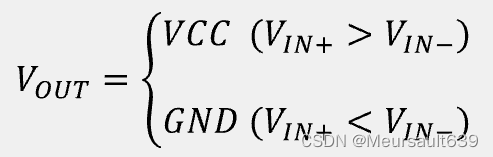
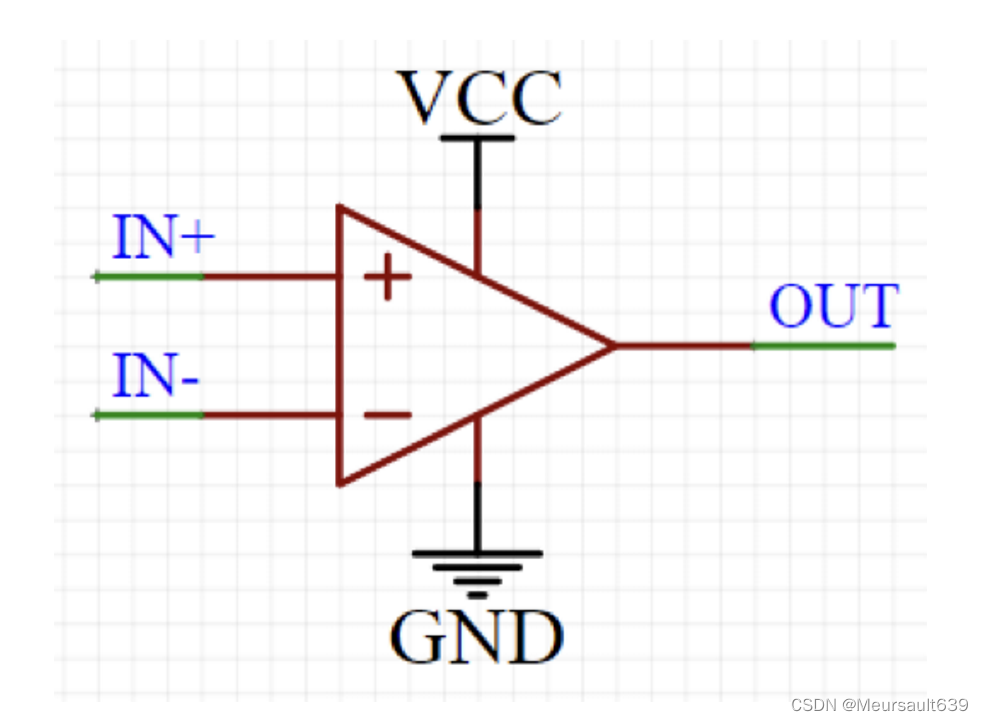
# 1、电压比较器
这是电压比较器的作用,当+大于-的时候,输出VCC,当-大于+的时候,输出GDN。
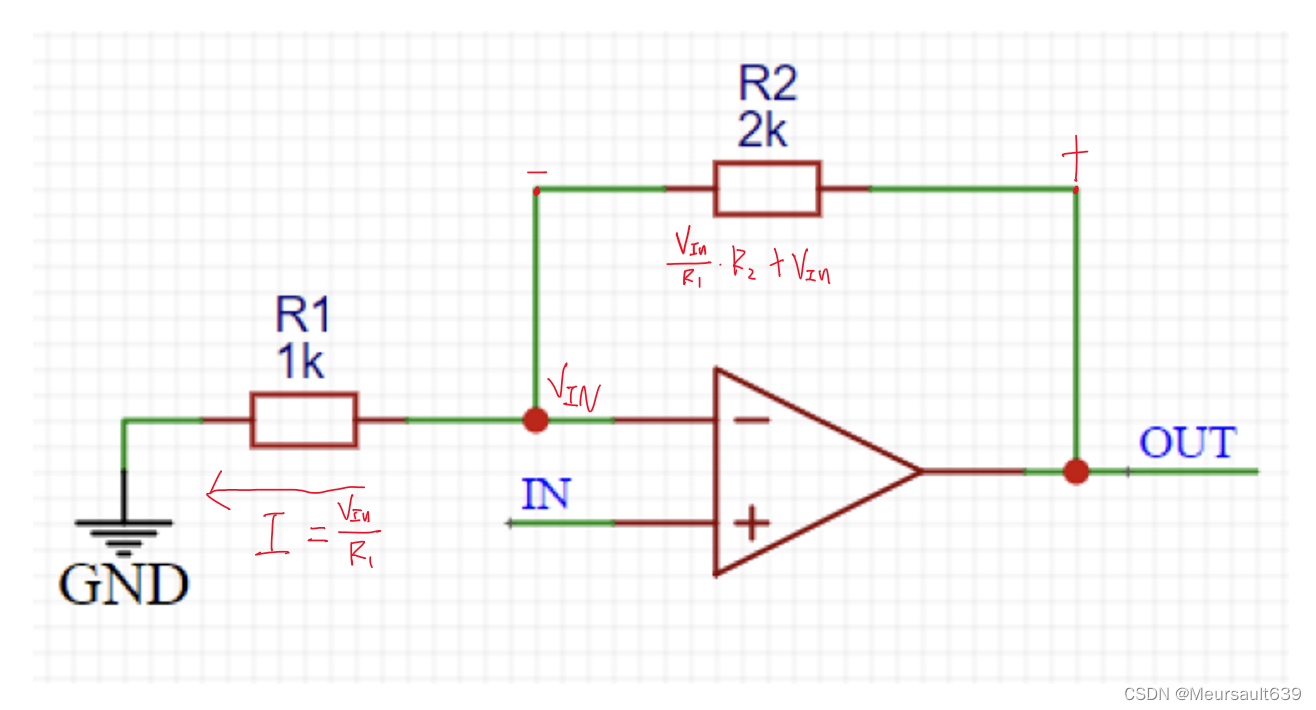
# 2、反向放大器
通过分析虚短和虚段可以得到这个结论。

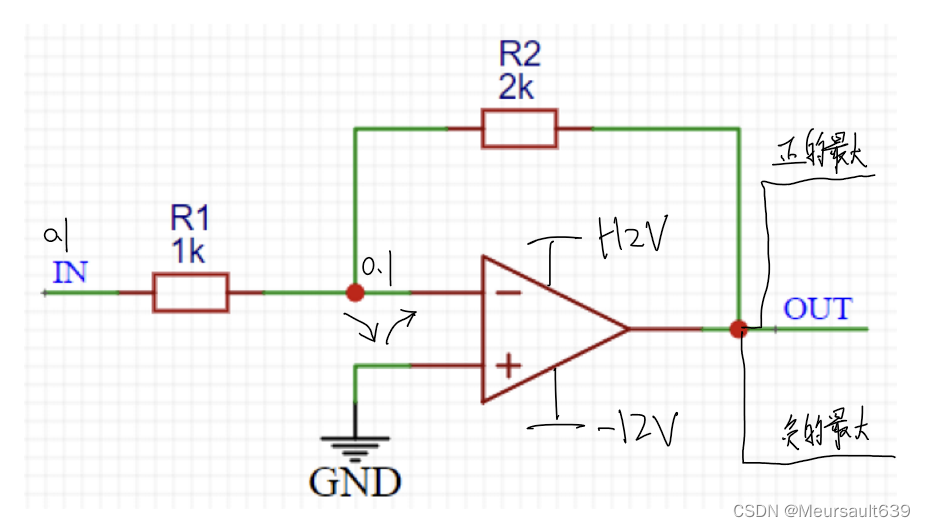
接R2的那条线路,形成了一个负反馈,如图,如果IN输入了0.1V,因为+极接的是GND,所以-极电压大于+极,OUT输出负的最大(电压比较器),但因为负反馈的存在,这个输出的负的最大又会反过来把电压(0.1V)拉低,这时+极电压又会比-极大,OUT输出正的最大,然后又是负反馈拉高输入的电压,就这样不断使输出起到与输入相反的作用,使系统输出与系统目标的误差减小,系统趋于稳定,最后使电路达到一个稳态,(-/+都为0V),这样我们的电路就形成了虚短的状态。
在电压比较器的两个输出端,因为运算比较器的输入阻抗非常大,即同相和反向输入端几乎都没有电流的输入和输出,这种情况我们就叫做虚断
公式的计算过程:
- 因为虚断和虚短,所以电流的方向就应该是从IN->R1->R2->OUT
- 所以,经过R1和R2的电流 I 就是IN的电压(之后我们简称VIn),除以R1的电阻,这样就可得R2的电压为I*R2
- 然后因为电流流向是从左到右,所以OUT的电压就是R2左边的电压减去R2的电压
- 又因为虚短,可知R2左边的电压为0V,所以公式为0-VIn/R1*R2
- 因为虚断和虚短,所以电流的方向就应该是从IN->R1->R2->OUT
# 3、同相放大器

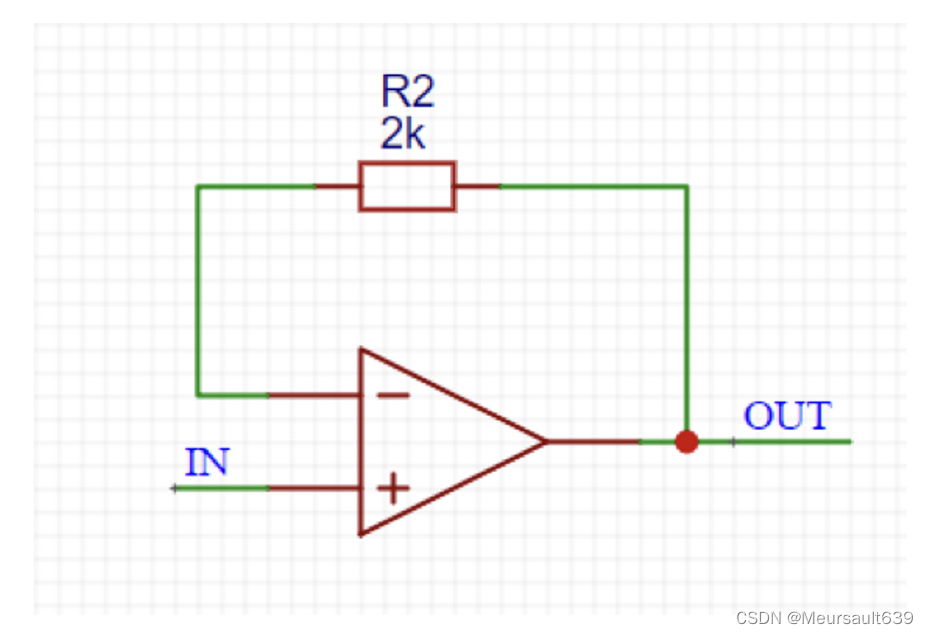
# 4、电压跟随器
# 五、DA原理
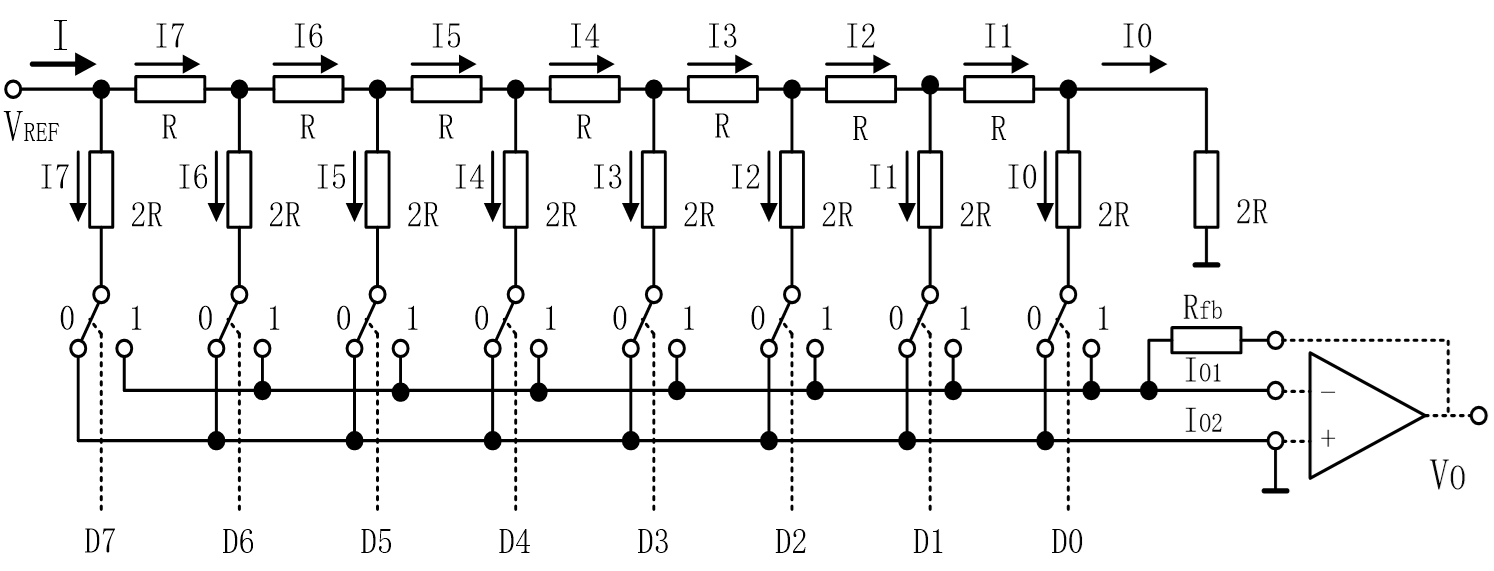
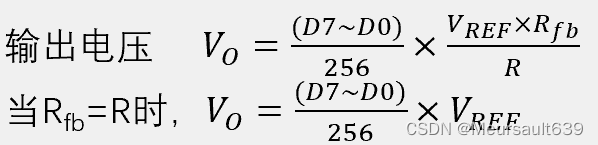
# 1、T型电阻网络DA转换器
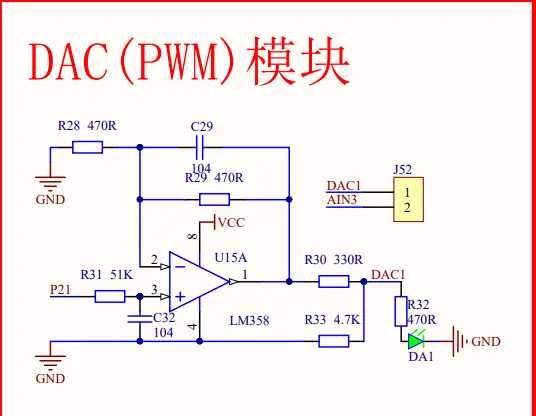
# 2、PWM型DA转换器
这个的作用就是将交流滤掉,变成直流电压。


# 六、AD原理
# 1、逐次逼近型AD转换器
逐次逼近型AD转换器的原理就是通过DAC不断变换去和输入的电压进行比较,直到找到一个合适的电压,输出对应数字量就行。

# 2、AD/DA性能指标
- 分辨率:指AD/DA数字量的精细程度,通常用位数表示。例如,对于5V电源系统来说,8位的AD可将5V等分为256份,即数字量变化最小一个单位时,模拟量变化5V/256=0.01953125V,所以,8位AD的电压分辨率为0.01953125V,AD/DA的位数越高,分辨率就越高
- 转换速度:表示AD/DA的最大采样/建立频率,通常用转换频率或者转换时间来表示,对于采样/输出高速信号,应注意AD/DA的转换速度
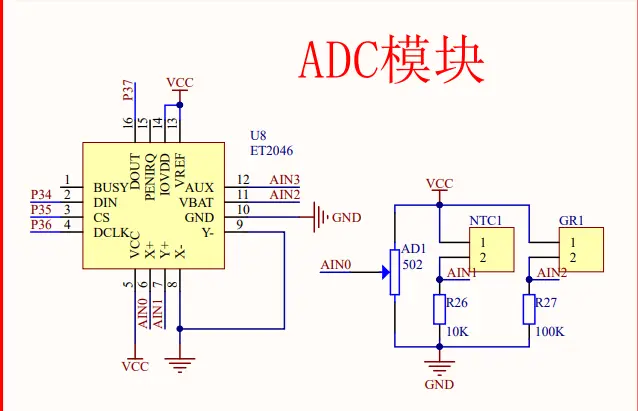
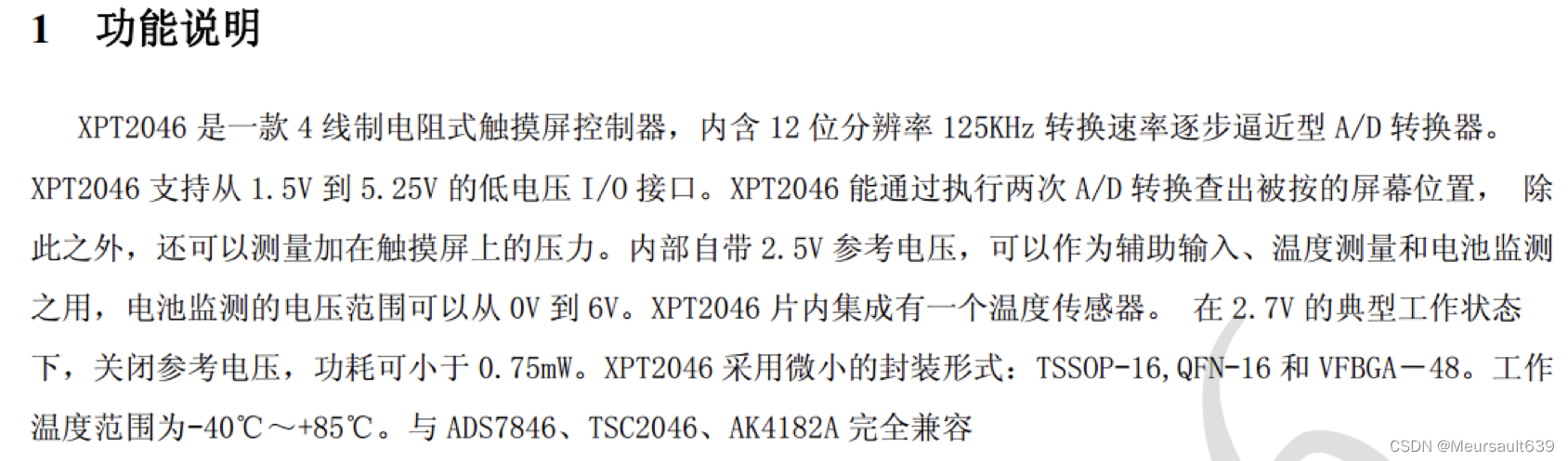
# 七、XPT2046
# 1、功能说明
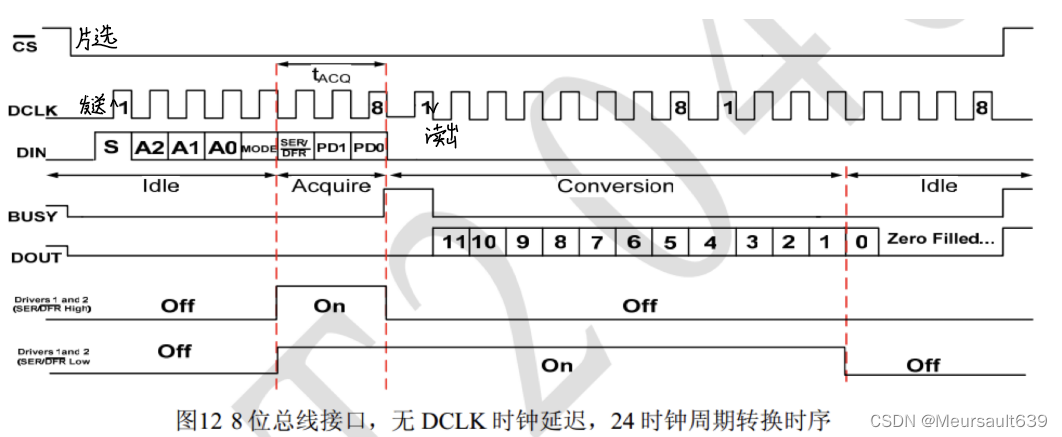
# 2、时序
CS作为片选,用来选择不同的设备,然后是DCLK上升沿为发送,下降沿为读出,DOUT是读出的值。
----XPT2046.c
#include <REGX52.H>
#include <INTRINS.H>
//引脚定义
sbit XPY2046_DIN=P3^4;
sbit XPY2046_CS=P3^5;
sbit XPY2046_DCLK=P3^6;
sbit XPY2046_DOUT=P3^7;
/**
* @brief ZPT2046读取AD值
* @param Command 命令字,范围:头文件内定义的宏,结尾的数字表示转换的位数
* @retval AD转换后的数字量,范围:8位为0~255,12位为0~4095
*/
unsigned int XPT2046_ReadAD(unsigned char Command)
{
unsigned char i;
unsigned int Data=0;
XPY2046_DCLK=0;//初始化
XPY2046_CS=0;
for(i=0;i<8;i++)
{
XPY2046_DIN=Command&(0x80>>i);
XPY2046_DCLK=1;
//这里可以不加延时,因为时间足够
XPY2046_DCLK=0;
}
for(i=0;i<16;i++)
{
XPY2046_DCLK=1;
XPY2046_DCLK=0;
if(XPY2046_DOUT)
{
Data|=(0x8000>>i);//16位
}
}
XPY2046_CS=1;
if(Command & 0x08){ //判断选择的是几位的,如果是8位,那后面是补充了8个0,所以要右移8位
return Data>>8;
}
else //如果是12位的,就是补充了4个0,所以要右移4位
return Data>>4;
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
# 八、AD数模转换代码
------XPT2046.h
#ifndef __XPT2046_H__
#define __XPT2046_H__
#define XPT2046_VBAT 0xAC //对应光敏电阻
#define XPT2046_AUX 0xEC
#define XPT2046_XP 0x9C //也可以是0xBC,X+的意思,对应可调电阻
#define XPT2046_YP 0xDC //Y+的意思,对应热敏电阻
unsigned int XPT2046_ReadAD(unsigned char Command);
#endif
2
3
4
5
6
7
8
9
10
11
12
13

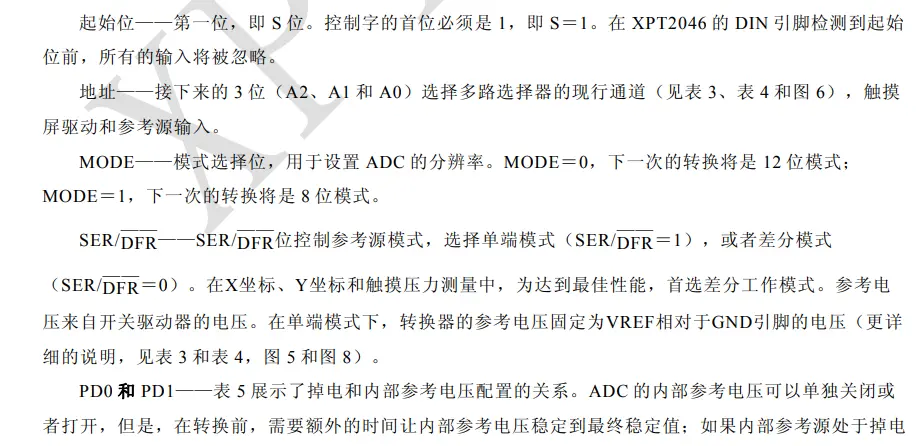
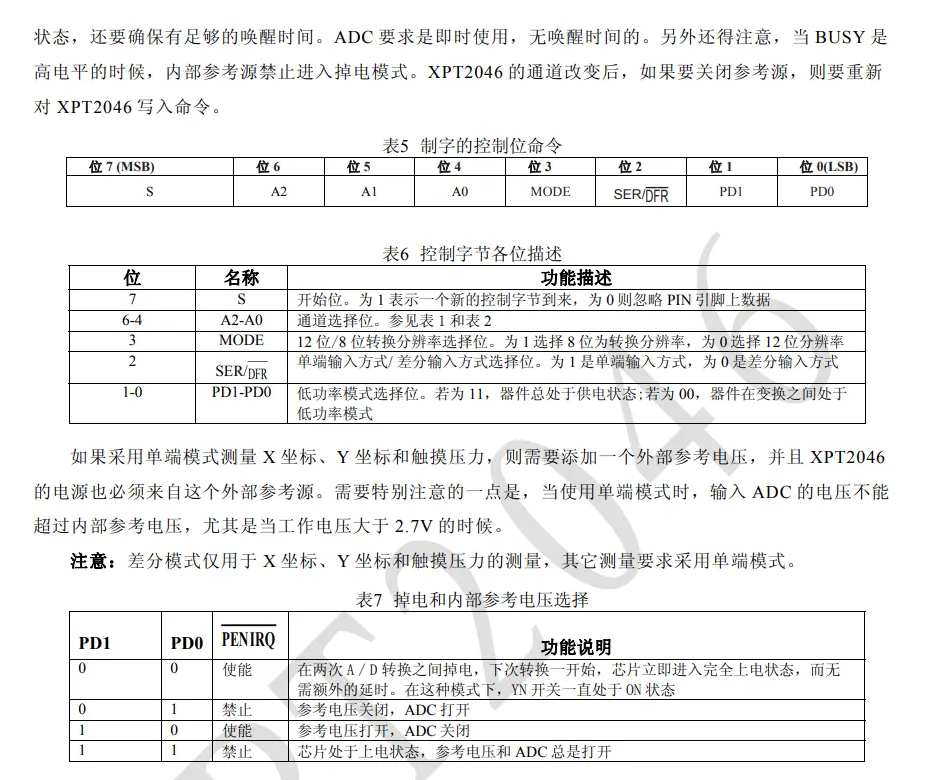
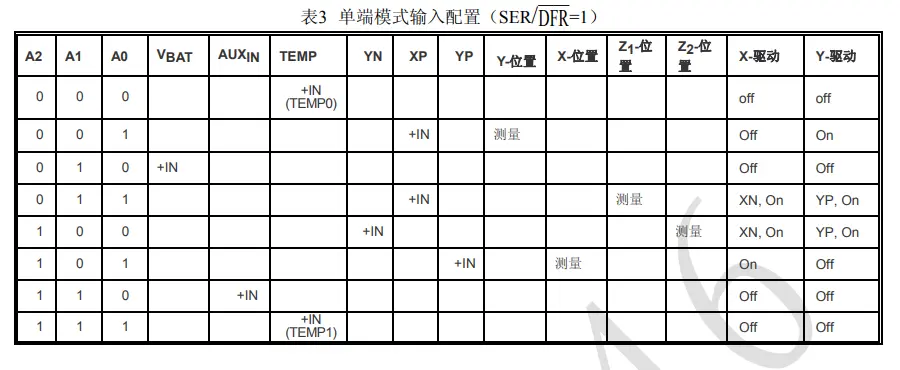
S必选1;
A0,A1,A2看下表
MODE看选择,上面代码给出的是8位模式,即MODE=1;
SER/—DFR,我们选单端模式(1),在需要触摸压力测试里就选差分模式(0);
PD1控制内部参考电压(2.5V)的开关,我们这里不使用内部参考电压,所以选了0;
PD0,老师说影响不大,1/0都行,选了0😥;
#ifndef __XPT2046_H__
#define __XPT2046_H__
#define XPT2046_VBAT 0xAC //对应光敏电阻
#define XPT2046_AUX 0xEC
#define XPT2046_XP 0x9C //也可以是0xBC,X+的意思,对应可调电阻
#define XPT2046_YP 0xDC //Y+的意思,对应热敏电阻
unsigned int XPT2046_ReadAD(unsigned char Command);
#endif
2
3
4
5
6
7
8
9
10
11
- main.c
#include <REGX52.H>
#include "Delay.h"
#include "LCD1602.h"
#include "XPT2046.h"
unsigned int ADValue;
void main(void)
{
LCD_Init();
LCD_ShowString(1,1,"ADJ NTC GR");
while(1)
{
ADValue=XPT2046_ReadAD(XPT2046_XP); //读取AIN0,可调电阻
LCD_ShowNum(2,1,ADValue,3); //显示AIN0
ADValue=XPT2046_ReadAD(XPT2046_YP); //读取AIN1,热敏电阻
LCD_ShowNum(2,6,ADValue,3); //显示AIN1
ADValue=XPT2046_ReadAD(XPT2046_VBAT); //读取AIN2,光敏电阻
LCD_ShowNum(2,11,ADValue,3); //显示AIN2
Delay(100);
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
# 九、DA数模转换
- 这个不是特别理解和DA的关系😣
#include <REGX52.H>
#include "Delay.h"
#include "Timer0.h"
sbit DA=P2^1;
unsigned char Counter,Compare; //计数值和比较值,用于输出PWM
unsigned char i;
void main()
{
Timer0_Init();
while(1)
{
for(i=0;i<100;i++)
{
Compare=i; //设置比较值,改变PWM占空比
Delay(10);
}
for(i=100;i>0;i--)
{
Compare=i; //设置比较值,改变PWM占空比
Delay(10);
}
}
}
void Timer0_Routine() interrupt 1
{
TL0 = 0x9C; //设置定时初值
TH0 = 0xFF; //设置定时初值
Counter++;
Counter%=100; //计数值变化范围限制在0~99
if(Counter<Compare) //计数值小于比较值
{
DA=1; //输出1
}
else //计数值大于比较值
{
DA=0; //输出0
}
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43